全自动影像自由网构建空三解算M3ATRECON

Mirauge3D具备强大的M3AT模块,能够智能化的处理航空、无人机、手机、家用相机等一系列的框幅式相机,M3AT智能、高效,同时能够处理多源数据,适应性强;
Mirauge3D的AAT设计可以应对海量的数据,对其进行高速处理,不受数据量的限制。对于海量数据的处理,建议引入GPS信息,将有效加快处理速度。
强大的AAT功能
M3ATRECON的AAT功能采用并行化的自由网技术,利用GPU加速下的光束法平差和稳健的相机自检校,以及GPS辅助稀疏控制点的高精度平差,使得其兼具效率和精度的双重优势。
在v2.0中我们更新改进了AAT的策略,能够在应付复杂数据的同时,兼顾海量数据处理的稳健性和效率,空三阶段完成生成详细的空三报告给用户提供参考。
| GSD | 数据影像数 | 空三时间(h) | 空三节点数 | 机器配置 |
|---|---|---|---|---|
| 0.01 | 5000.00 | 5h | 2.00 | 16G,i7-7700 ,1050 |
| 0.02 | 29000.00 | 17h | 7.00 | 64G,i7,1070 |
| 0.03 | 38000.00 | 10h | 10.00 | 64G,i9,1080 |
| 0.05 | 11000.00 | 6.50h | 4.00 | 64-128g,i7-7,1080ti |
| 0.05 | 11000.00 | 6.50h | 4.00 | 64-128g,i7-7,1080ti |
| 0.05 | 26000.00 | 48h | 2.00 | 20h,8.00 |
| 0.15 | 28000.00 | 20h | 8.00 | 128g,1080t |
| 0.15 | 90000.00 | 48h | 10.00 | 128g,i7,1080 |
稀疏控制点辅助平差
M3ATRECON支持稀疏控制点的GPS辅助平差,用户只需要在四角布点或者四角加中心布设控制点,再使用PPP单点定位解算GPS即可达到极高精度,以下案例使用四角加中心5个控制点布点,影像分辨率为6cm,15个检查点,在GPS存在较大偏移的情况下,M3ATRECON的解算后可以达到1:1000的精度。
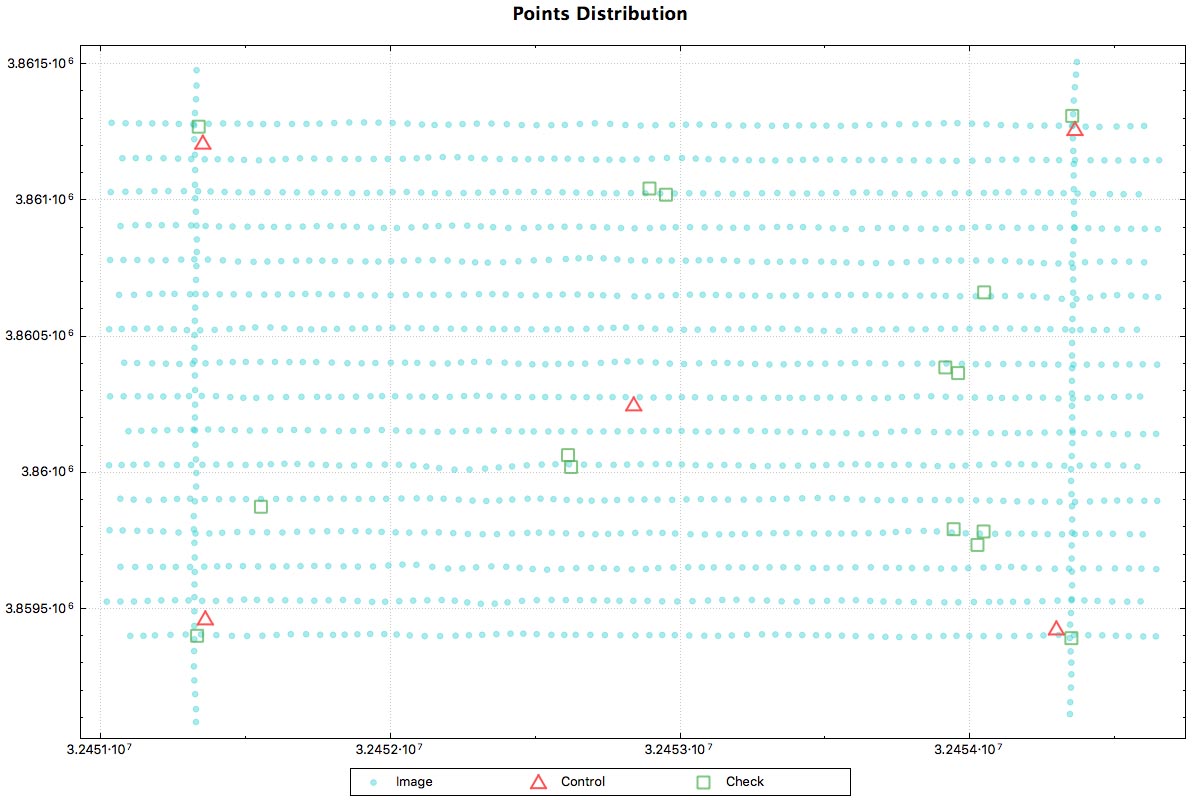
无人机影像使用GPS辅助稀疏控制点(四角加中心布点)完成1:1000精度案例
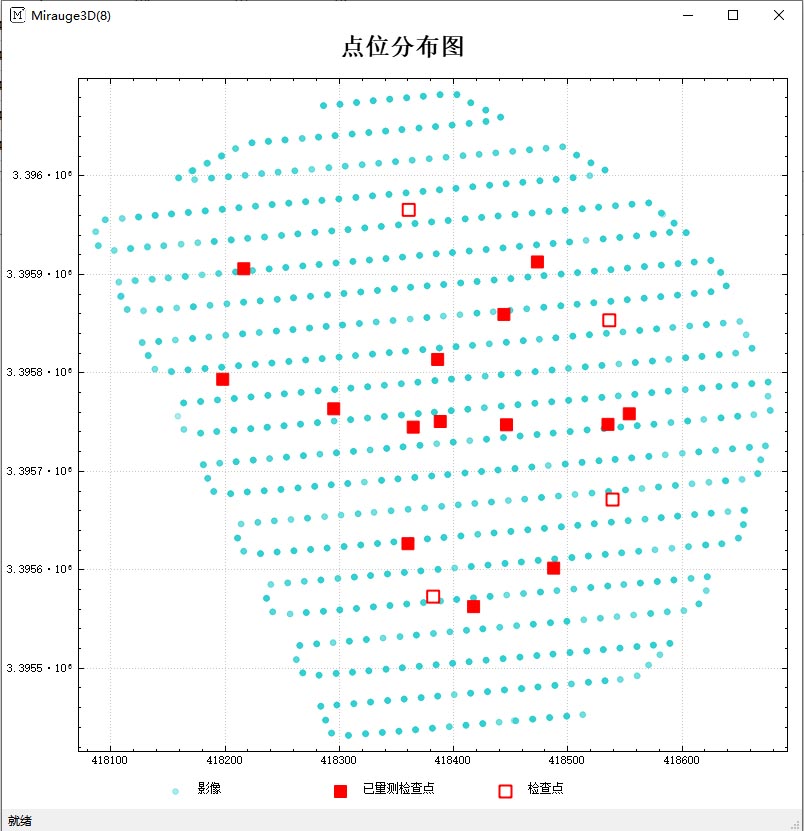
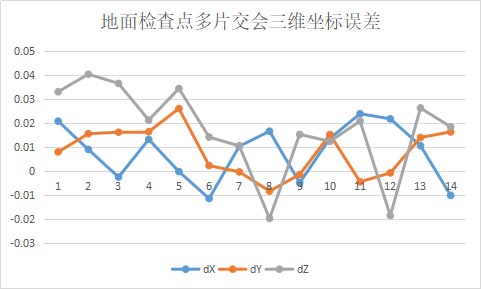
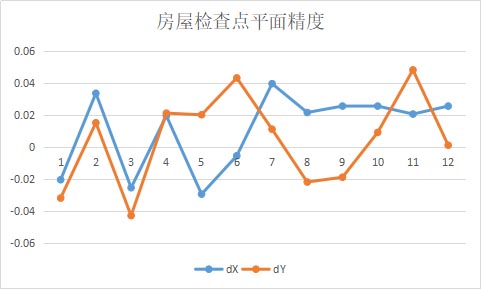
M3ATRECON也支持免像控高精度平差,用户使用带有高精度POS的影像数据,设置合理的相机畸变参数,并且提升高精度GPS在空三处理部分的权重,即可达到免像控的精度要求。以下案例使用RTK布设14个地面检查点以及使用全站仪布设12个房屋检查点,地面采样间距(GSD)为1.4厘米,在不适用像控点的情况下满足了地籍1:500的精度要求。
光束法平差系统XBA
M3ATRECON采用高效并行平差系统,最大化的分离了内外方位元素的相关性,得到相对v1.0更可靠的解,同时XBA引入新的粗差剔除策略也让整体系统的稳健性更强,精度更高,整体RMSE基本能保持在0.5~0.7pixel;控制点编辑界面也做了调整方便用户使用。
2.0版本可以在20分钟内完成多达13682张影像的光束法平差解算,最高26倍于传统算法,提高速度的同时不损失精度。
M3At高效平差系统与传统软件对比
空三成果
10万级影像空三一次通过已是常态
13万张影像,大面积测区单个工程,空三一次通过。
大面积弱纹理区域
5镜头,8000张影像,海边滩涂数据60%-70%测区面 积均为水域
多架次、不同航高,高差变化大
5镜头,多架次、不同航高,测区建筑物高差差异 大,空三无分层,一次解算成功
大面积、弱纹理、复杂地形等
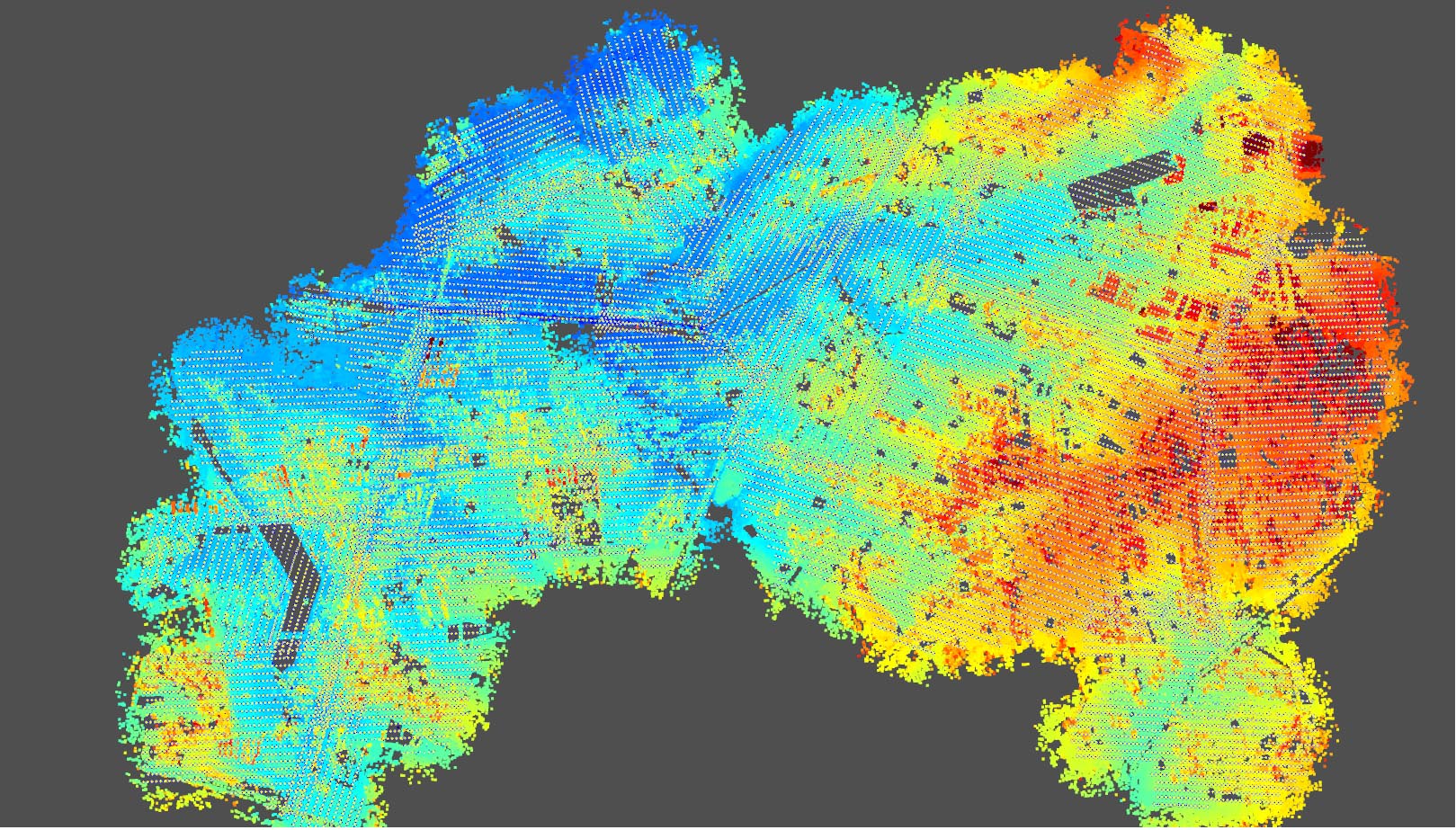
67平方公里采煤塌陷区,包括城区、村庄、塌陷区以及水坑,75000张、10个节点、3天半空三一次通过;
解决大面积、高差差异大的空三问题
6区整体高差差异较大,51540张影像,测区被水域分割;
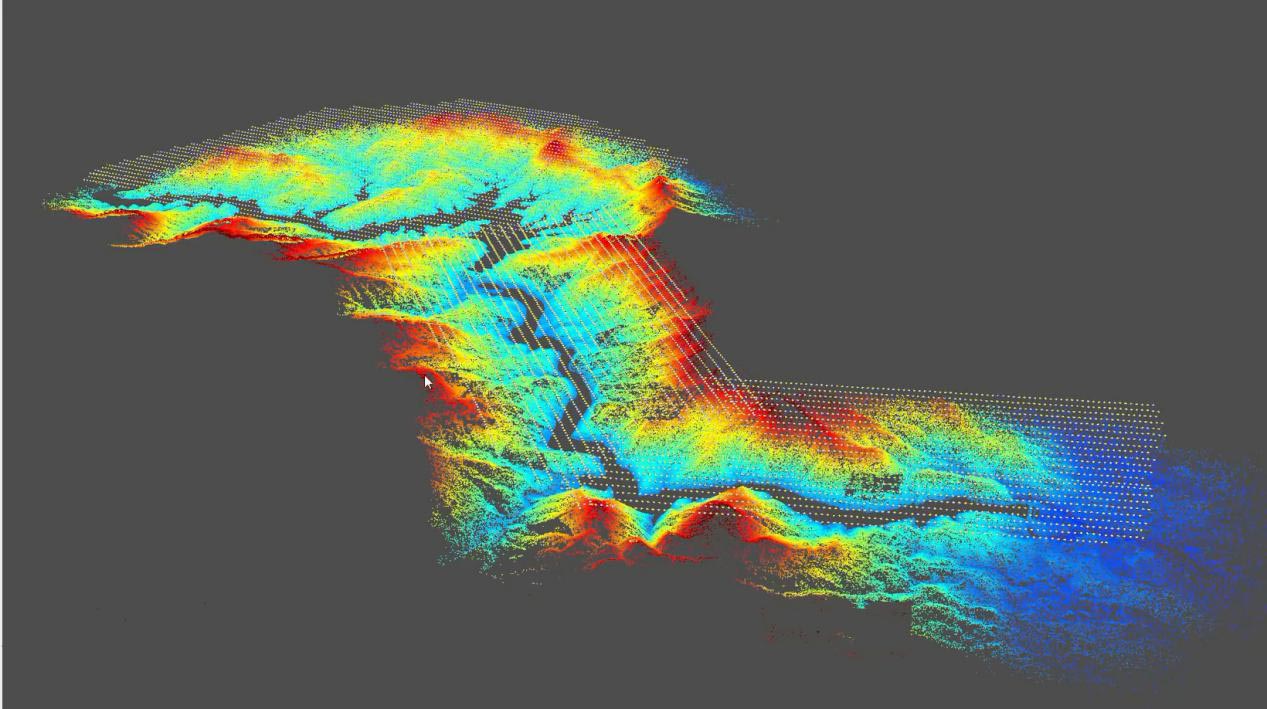
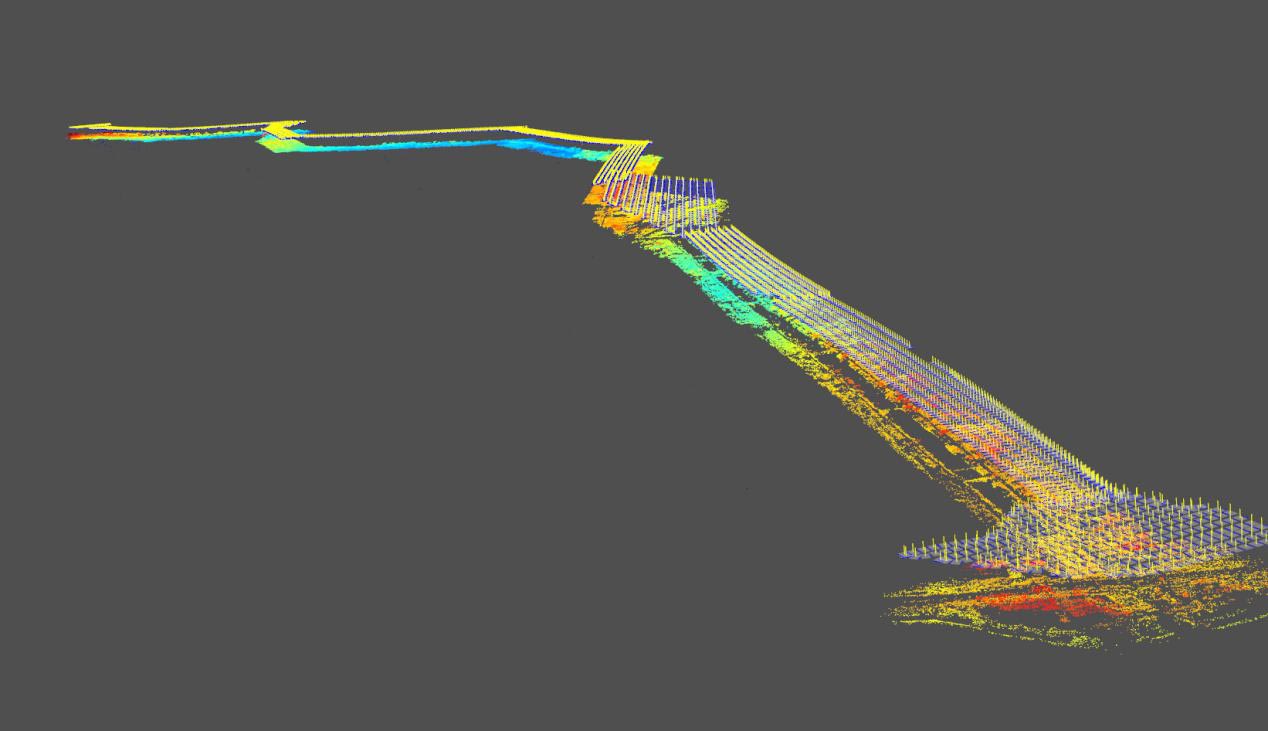
无控制点超长带状数据
孟加拉带状正射、8000张影像,全长13公里长条带状公路,无需控制点,顺利完成空三;
M3At力求设计简单易用,使用户更容易上手,尽可能减少需要的人工交互操作,极大提升软件自动化程度